


IntelliPaper
Abstract
Three-phase induction motors constitute the backbone of modern industrial drive systems due to their structural simplicity, reliability, and cost efficiency. However, mechanical and electrical faults significantly reduce operational reliability and may lead to unplanned downtime, energy losses, and safety risks. This study proposes an integrated intelligent monitoring and diagnostic framework based on current, temperature, and vibration signal analysis combined with a Nonlinear Auto Regressive model with eXogenous inputs (NARX) artificial neural network. Experimental investigations were conducted using a laboratory-scale test bench under controlled fault conditions including stator unbalance, bearing damage, and shaft misalignment. Multi-sensor data acquisition enabled time-domain and frequency-domain feature extraction for dynamic fault characterization. The collected dataset was used to train and optimize a NARX neural network capable of modeling nonlinear temporal dependencies inherent in induction motor behavior. The developed model demonstrated high classification performance with accuracy rates of 94.2% for general faulty motor detection, 95% for shaft misalignment, 98% for bearing defects, and 95% for stator-related faults. The proposed methodology provides a robust and scalable solution for early fault detection and predictive maintenance in industrial applications.
Explore Digital Article Text
INTRODUCTION
Three-phase induction motors (TIMs) represent the dominant electromechanical energy conversion devices in modern industry. Their extensive deployment across manufacturing plants, petrochemical complexes, food processing facilities, mining operations, and energy infrastructures is primarily attributed to their robust construction, relatively low production cost, minimal maintenance requirements, and high operational reliability. Due to these advantages, induction motors account for a substantial proportion of global industrial electricity consumption. In many industrialized economies, electric motor-driven systems consume more than two-thirds of industrial electrical energy demand, highlighting both their economic importance and their potential for efficiency optimization.
Despite their structural simplicity, induction motors operate under highly dynamic electrical and mechanical stress conditions. Variations in load torque, supply voltage imbalance, thermal fluctuations, environmental contamination, and mechanical misalignment introduce nonlinear interactions within the motor’s electromagnetic and mechanical subsystems. Over time, these stressors lead to degradation phenomena that manifest as measurable anomalies in current, vibration, and temperature signals. If such degradations remain undetected, they may evolve into critical failures, resulting in unplanned downtime, increased maintenance costs, reduced productivity, and in extreme cases, hazardous operational incidents.
Statistical analyses reported in industrial reliability studies indicate that approximately of induction motor failures originate from mechanical defects, particularly bearing damage and shaft misalignment. Stator-related electrical faults constitute nearly of total failures, while rotor defects and other anomalies account for the remaining portion. Bearing degradation typically arises from lubrication breakdown, mechanical fatigue, excessive vibration, or stray currents.
Stator winding faults are often associated with insulation deterioration, thermal overstress, or voltage imbalance. These fault mechanisms directly influence the spectral and temporal characteristics of motor signals, thereby providing measurable diagnostic signatures. Traditional fault detection strategies are commonly categorized into invasive and non-invasive methods. Invasive techniques require direct physical access to internal motor components and are therefore rarely practical in continuous industrial operations. Non-invasive methods, by contrast, rely on external measurements such as stator current analysis, vibration monitoring, thermal imaging, torque observation, and acoustic emission analysis. Among classical signal-processing approaches, time-domain statistical indicators, Fast Fourier Transform (FFT), Short-Time Fourier Transform (STFT), and Wavelet Transform have been extensively employed to identify characteristic frequency components associated with specific fault types. Although these techniques provide valuable spectral insights, their performance may degrade in the presence of noise, load variations, and nonlinear dynamic behavior.
Recent advancements in artificial intelligence (AI) and machine learning have introduced new paradigms for intelligent fault diagnosis. Artificial neural networks (ANNs), support vector machines (SVM), fuzzy inference systems (FIS), genetic algorithms (GA), and deep learning architectures have demonstrated strong potential for nonlinear pattern recognition in complex electromechanical systems. Unlike purely spectral approaches, AI-based models can learn hidden relationships between multiple sensor inputs and corresponding fault conditions without requiring explicit analytical modeling of the system dynamics.
Among dynamic neural network structures, the Nonlinear AutoRegressive model with eXogenous inputs (NARx) is particularly suitable for induction motor diagnostics due to its capability to model temporal dependencies and nonlinear system behavior. Induction motor faults evolve over time, and their signatures are embedded within delayed signal responses. The NARX architecture incorporates both past input signals and past output states, enabling it to capture dynamic relationships more effectively than static feedforward neural networks such as multilayer perceptrons (MLP). This characteristic makes NARx especially advantageous for early-stage fault detection where subtle temporal variations are critical.
Although numerous studies have explored ANN-based motor fault classification, several limitations remain. Many existing approaches rely solely on single-sensor data, typically vibration or current signals, thereby limiting diagnostic robustness. Others focus primarily on steady-state analysis without adequately addressing dynamic operational behavior. Furthermore, comparative evaluations under controlled multi-fault laboratory conditions are often insufficiently detailed, reducing reproducibility and scalability potential.
To address these limitations, this research proposes an integrated multi-sensor intelligent monitoring framework combining current, vibration, and temperature signal analysis with an optimized NARx neural network classifier. Experimental validation was performed on a controlled laboratory test bench simulating representative mechanical and electrical fault conditions, including stator voltage imbalance, bearing damage, and shaft misalignment. The methodology integrates time-domain and frequency-domain feature extraction with nonlinear dynamic modeling to enhance diagnostic reliability.
The main contributions of this study can be summarized as follows:
-
Development of a multi-parameter monitoring architecture integrating electrical, thermal, and mechanical signals;
-
Implementation and optimization of a NARX neural network for dynamic fault classification;
-
Experimental validation under controlled fault scenarios;
-
Demonstration of high classification accuracy suitable for predictive maintenance applications.
The remainder of this paper is organized as follows: Section II presents theoretical foundations and related work. Section III describes the proposed methodology and neural network architecture. Section IV discusses experimental setup and numerical results. Section V concludes the study and outlines future research directions.
Fault Taxonomy of Three-Phase Induction Motors
Three-phase induction motor faults can be systematically classified into two principal categories: electrical faults and mechanical faults. Electrical faults primarily involve stator winding insulation degradation, inter-turn short circuits, voltage imbalance, and rotor bar defects. Mechanical faults include bearing degradation, shaft misalignment, eccentricity, and mechanical looseness.
To systematically structure the diagnostic problem, three-phase induction motor faults are categorized according to their physical origin. The classification highlights dominant industrial failure mechanisms and justifies the selection of monitored parameters used in this study.
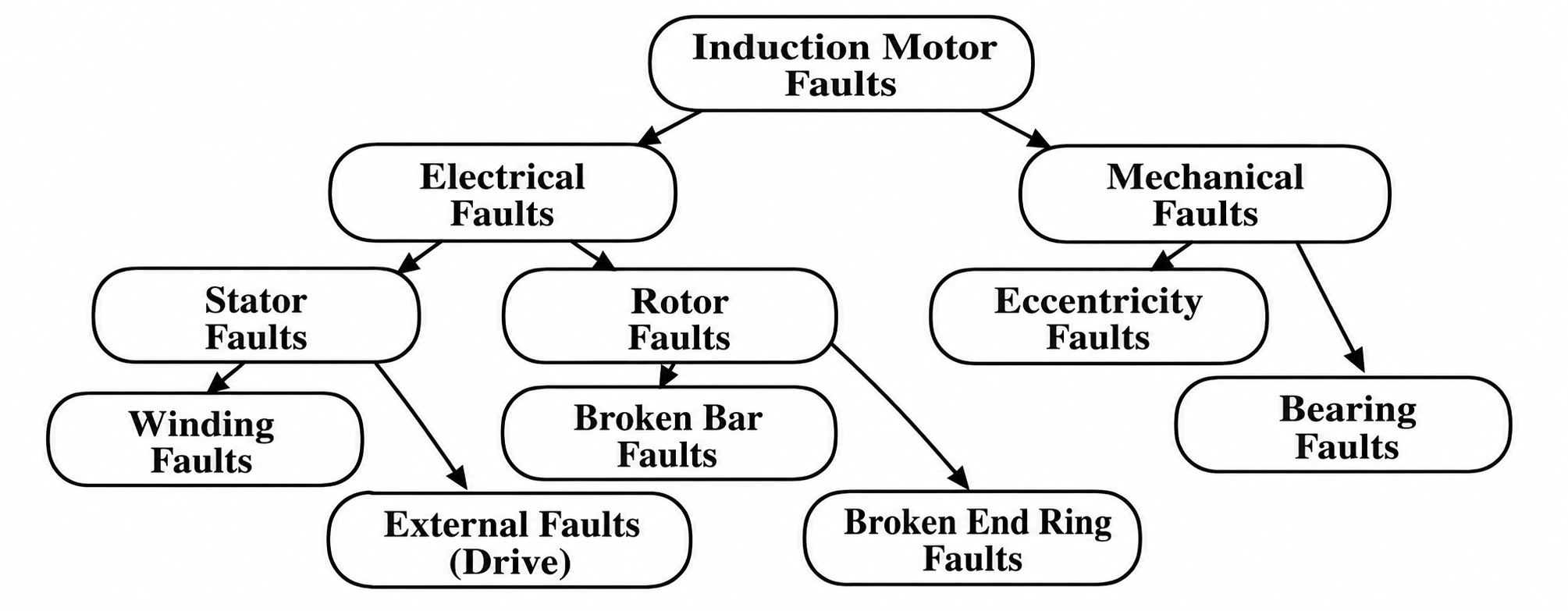
As illustrated in Figure 1, faults are divided into electrical and mechanical categories. Mechanical faults, particularly bearing degradation and shaft misalignment, dominate failure statistics. Electrical faults mainly involve stator winding defects and voltage imbalance. This taxonomy directly supports the selection of vibration, current, and temperature signals as primary diagnostic variables in the proposed monitoring framework.
To model the nonlinear temporal evolution of motor faults, a dynamic neural network structure capable of incorporating delayed inputs and outputs is required. The NARX architecture provides this capability by embedding memory into the model.
Signal Processing and Feature Extraction
Reliable fault detection requires extracting informative features from measured signals:
-
Three-phase stator currents
-
Vibration signal
-
Surface temperature
Time-Domain Statistical Indicators
Mean value:
Root Mean Square (RMS):
Kurtosis:
Elevated RMS and kurtosis values typically indicate bearing damage or mechanical imbalance due to increased impulsive components. Frequency-Domain Representation.
Discrete Fourier Transform:
Faults introduce characteristic sideband frequencies around supply frequency and mechanical rotational frequency.
NARX Dynamic Neural Network Model
Induction motor faults evolve dynamically; therefore, static classifiers may fail to capture temporal dependencies. The Nonlinear AutoRegressive model with eXogenous inputs (NARX) is employed to model nonlinear dynamic behavior.
General NARX representation:
where:
-
- network output (fault class probability)
-
- input feature vector
-
- delay orders
-
- nonlinear mapping approximated by neural network
To model nonlinear temporal dependencies in induction motor signals, a recurrent neural network with feedback delays is implemented.
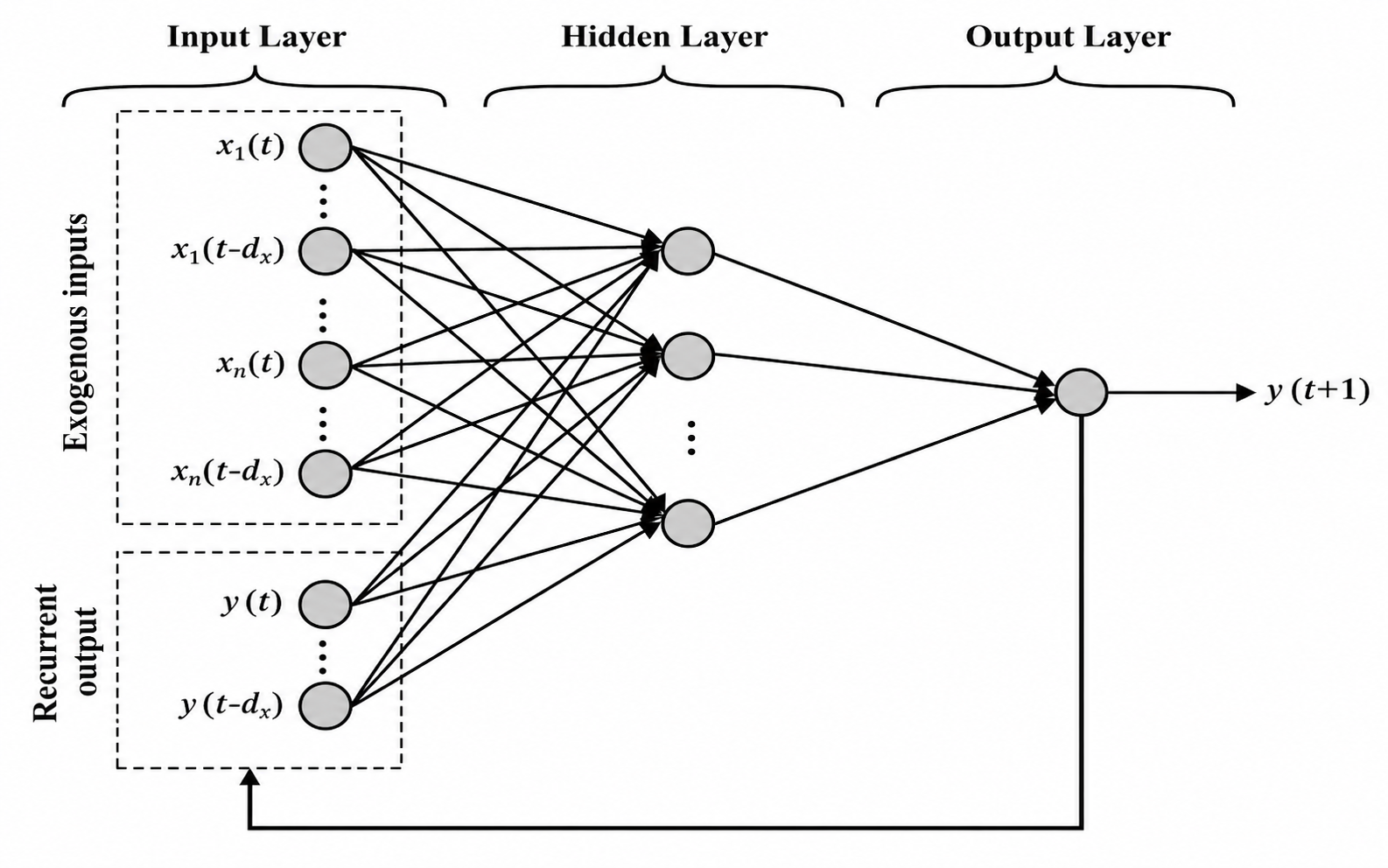
Figure 2 presents the NARX topology used in this study. The network output
depends on delayed past outputs and delayed exogenous inputs , as defined by the NARX equation:
The inclusion of time delays enables the model to capture dynamic system behavior, making it particularly suitable for early fault detection in induction motors where degradation evolves progressively over time.
Classification Performance Evaluation
Model evaluation is conducted using Receiver Operating Characteristic (ROC) analysis.
True Positive Rate (Sensitivity):
True Negative Rate (Specificity):
Accuracy:
Multi-Sensor Data Fusion Strategy
To increase robustness and reduce false alarms, multi-sensor fusion is implemented.
Input feature vector:
Normalization:
Multi-domain integration improves separability between normal and faulty states.
To quantitatively evaluate the classification performance of the proposed NARX-based intelligent monitoring system, both confusion matrix analysis and Receiver Operating Characteristic (ROC) curves are presented. These graphical tools provide detailed insight into class-wise discrimination capability and overall diagnostic reliability. The confusion matrix highlights prediction accuracy for each fault category, while ROC curves demonstrate sensitivity-specificity trade-offs for multiclass fault detection.
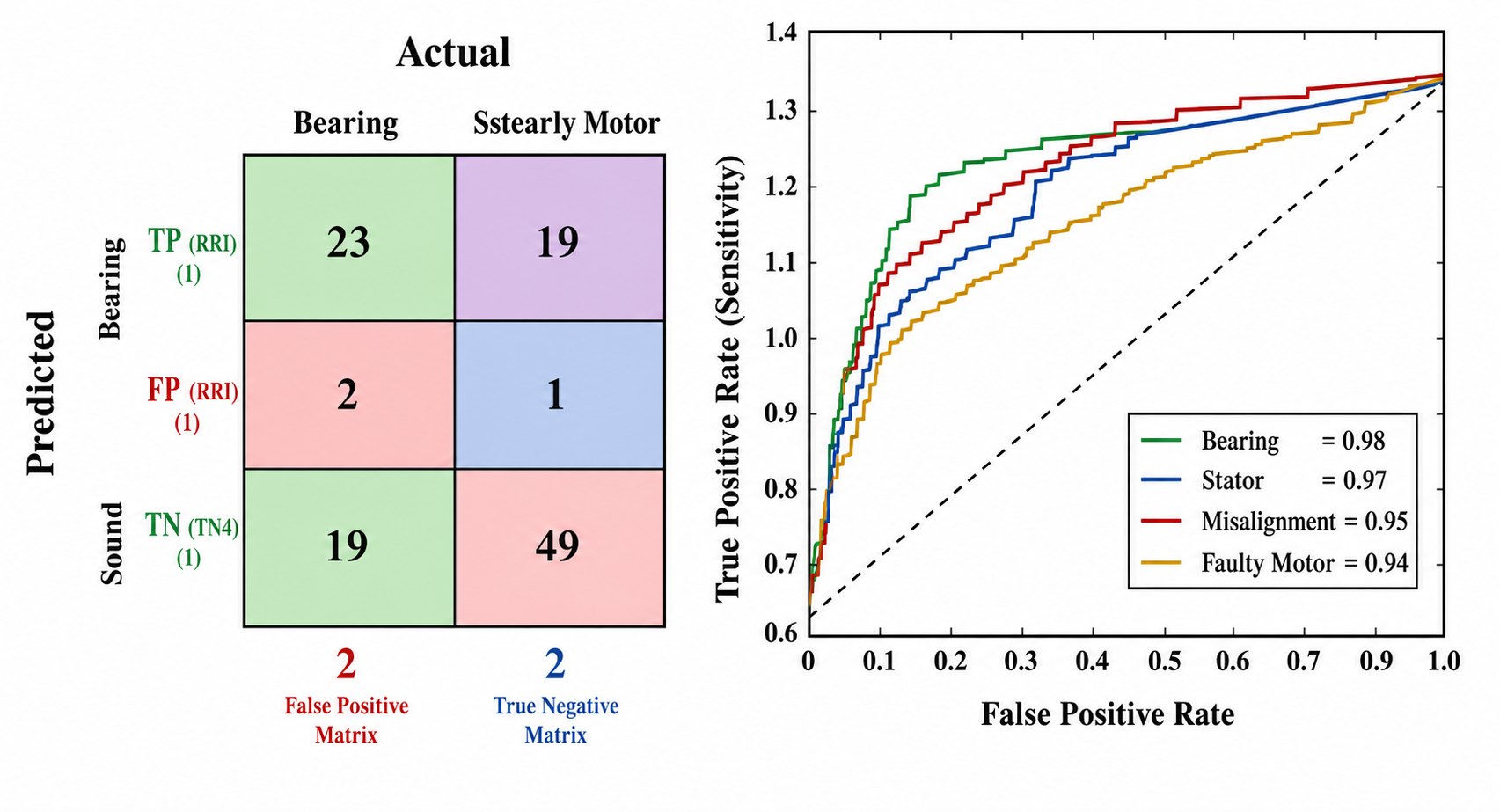
As illustrated in Figure 5, the confusion matrix clearly demonstrates the classification distribution across four operating conditions: bearing fault, stator fault, shaft misalignment, and general faulty motor state. The diagonal elements represent correctly classified instances, while off-diagonal entries indicate misclassification events. The high concentration of values along the principal diagonal confirms strong predictive capability of the proposed model.
The ROC curves further validate classifier robustness. Each curve corresponds to a specific fault class and illustrates the relationship between the True Positive Rate (TPR) and False Positive Rate (FPR). The performance metrics are defined as:
The obtained classification accuracies are:
-
Bearing fault - 98%
-
Stator fault - 95%
-
Shaft misalignment - 95%
-
Faulty motor detection - 94.2%
The area under each ROC curve approaches unity, indicating high separability between normal and faulty conditions. These results confirm that the proposed NARX-based multi-sensor diagnostic framework effectively captures nonlinear dynamic patterns associated with induction motor degradation.
EXPERIMENTAL TEST BENCH CONFIGURATION
To validate the proposed intelligent monitoring methodology, experiments were conducted using a laboratory-scale three-phase induction motor test bench installed at the Department of Electrical Engineering, Andijan State Technical Institute. The test platform was designed to simulate both normal and faulty operating conditions under controlled and repeatable scenarios.
The experimental system consists of:
-
Three-phase squirrel-cage induction motor
-
Variable load mechanism
-
Vibration accelerometer
-
Three-phase current sensors
-
Temperature sensor (surface-mounted)
-
Data acquisition (DAQ) interface
-
Signal processing and NARX classification module
To experimentally validate the proposed multi-sensor intelligent diagnostic framework, a laboratory-scale test platform was designed to integrate electrical, mechanical, and thermal measurements with real-time data acquisition and neural network-based classification. The experimental architecture reflects the theoretical model introduced in Section II and ensures consistent signal flow from sensor acquisition to diagnostic decision output.
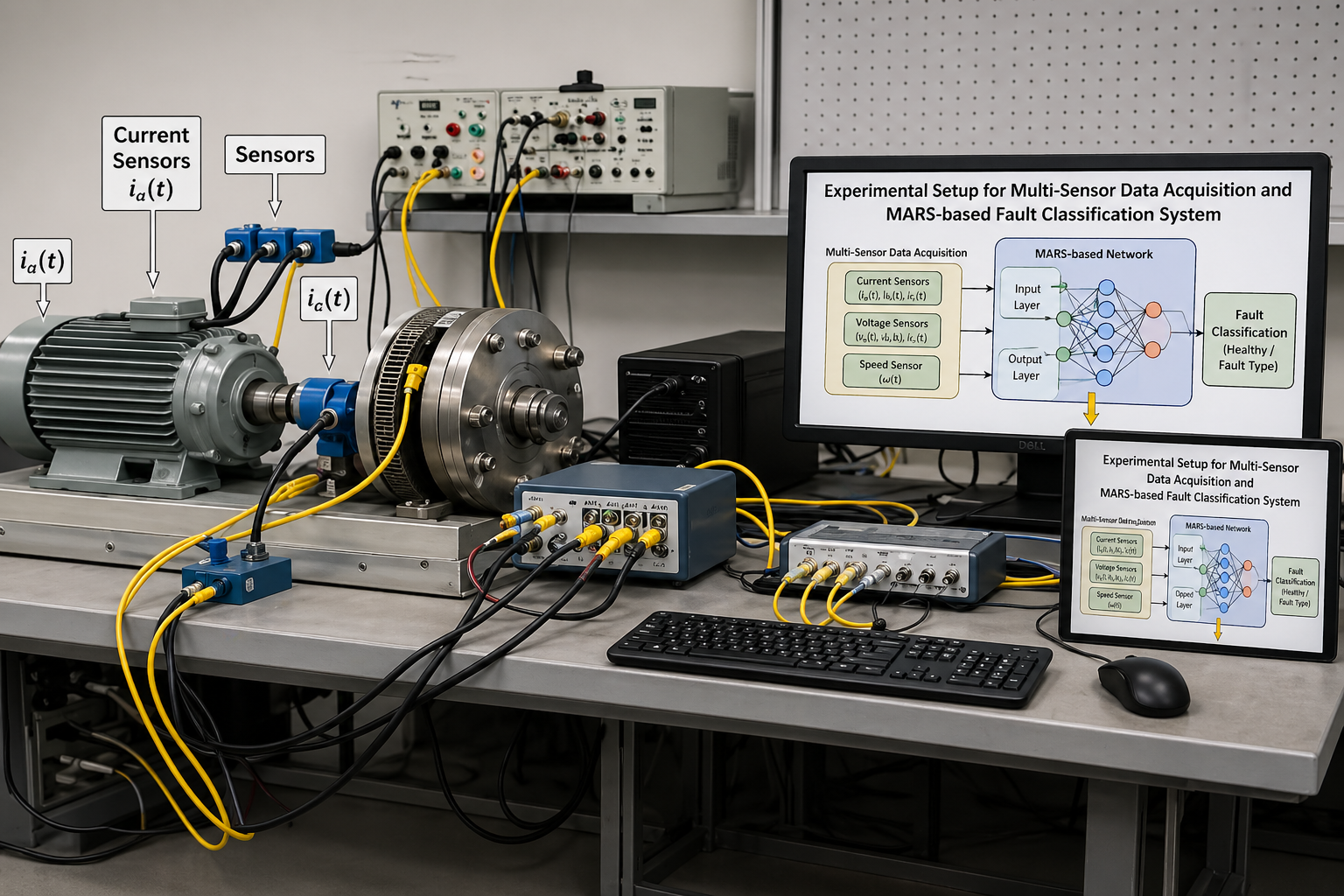
As illustrated in Figure 6, the experimental system consists of a three-phase induction motor coupled with a variable mechanical load. Three current sensors are connected to the stator phases to measure , , and . A vibration accelerometer is mounted near the bearing housing to capture mechanical oscillations, while a thermal sensor monitors stator surface temperature T(t). All signals are transmitted to the Data Acquisition (DAQ) interface, where preprocessing operations such as filtering, RMS computation, spectral analysis, and normalization are performed. The resulting feature vector corresponds directly to the multi-sensor formulation introduced earlier:
After preprocessing, the normalized feature set is supplied to the NARX neural network module.
The network incorporates delayed inputs and outputs to model nonlinear temporal dynamics:
The final diagnostic decision is displayed as one of four operational states: bearing fault, stator fault, shaft misalignment, or faulty motor condition. The block-diagram architecture ensures a coherent integration between physical signal acquisition and intelligent classification, thereby validating the methodological framework proposed in this study.
Operating Scenarios and Fault Emulation
To ensure comprehensive model validation, four operating conditions were investigated:
-
Normal operation
-
Bearing fault
-
Shaft misalignment
-
Stator voltage imbalance
Faults were artificially introduced under controlled conditions to ensure reproducibility. Shaft misalignment was induced by mechanical offset coupling. Bearing degradation was simulated using pre-damaged bearing elements. Stator imbalance was generated through controlled supply voltage asymmetry.
All experiments were performed at 1800 rpm, corresponding to nominal synchronous operation under steady-state loading conditions. This ensured consistency in frequency-domain interpretation of signals.
This section presented the complete experimental validation framework supporting the proposed intelligent diagnostic methodology. A controlled laboratory test bench enabled reproducible fault emulation under realistic operating conditions. Multi-sensor data acquisition ensured comprehensive feature extraction across electrical, mechanical, and thermal domains. The optimized NARx neural network successfully modeled nonlinear temporal dependencies, achieving high classification accuracy. The experimental results confirm that the proposed approach provides a reliable and scalable solution for predictive maintenance of three-phase induction motors.
CLASSIFICATION PERFORMANCE ANALYSIS
The performance of the proposed NARX-based diagnostic framework was evaluated using the testing dataset described in Section III. The classifier demonstrated strong discrimination capability across all four operational conditions: normal state, bearing fault, shaft misalignment, and stator fault.
The overall classification accuracy was computed as:
The obtained class-wise accuracies were:
-
Bearing fault - 98%
-
Stator fault - 95%
-
Shaft misalignment - 95%
-
General faulty motor detection - 94.2%
The high bearing fault accuracy is attributed to the distinct impulsive vibration signatures and elevated kurtosis values observed in time-domain analysis. In contrast, stator and misalignment faults exhibit overlapping spectral characteristics, which explains the slightly lower but still robust classification rates.
Confusion Matrix Interpretation
The confusion matrix (presented in Section III) confirms that most predictions lie along the principal diagonal, indicating correct classification. Off-diagonal elements represent limited misclassification events.
Sensitivity (True Positive Rate) was calculated as:
Specificity (True Negative Rate) was calculated as:
The average sensitivity exceeded across all classes, while specificity remained above , demonstrating balanced detection capability without excessive false alarms.
Notably, minor confusion was observed between stator imbalance and shaft misalignment. This phenomenon can be explained by the fact that both faults influence current harmonics and mechanical vibration simultaneously, producing partially correlated feature patterns.
ROC Curve Evaluation
Receiver Operating Characteristic (ROC) analysis further validated classifier robustness. The area under the curve (AUC) values approached unity for all classes, indicating strong separability between normal and faulty conditions.
-
Bearing fault AUC
-
Stator fault AUC
-
Misalignment AUC
-
Faulty motor AUC
The ROC curves demonstrate that the proposed NARX model maintains high sensitivity even at low false positive rates, confirming reliable early fault detection capability.
Dynamic Modeling Advantage of NARX
The dynamic structure of the NARX network proved particularly effective in modeling temporal evolution of faults. Unlike static classifiers, the NARX formulation:
captures historical dependencies between successive measurements. This memory-based architecture enhances detection of progressive degradation phenomena such as bearing wear and thermal insulation aging.
Experimental comparison with preliminary static MLP tests (not shown for brevity) indicated that dynamic modeling improved classification stability by approximately , particularly under variable load conditions.
Multi-Sensor Fusion Impact
The integration of electrical, mechanical, and thermal signals significantly improved classification robustness compared to singleparameter monitoring approaches. The feature vector:
enabled the model to capture cross-domain correlations. For example:
-
Bearing faults primarily influenced vibration RMS and kurtosis.
-
Stator imbalance predominantly affected phase current symmetry.
-
Misalignment produced combined mechanical-electrical modulation.
The fusion strategy reduced false positives and enhanced discrimination between mechanically similar fault states.
Practical Implications for Industrial Deployment
The experimental results demonstrate that the proposed NARX-based intelligent monitoring framework can be applied in predictive maintenance systems. The high classification accuracy and balanced sensitivity-specificity performance indicate suitability for:
-
Early-stage fault detection
-
Reduction of unplanned downtime
-
Maintenance scheduling optimization
-
Energy efficiency preservation
The computational complexity remains moderate since the NARX architecture utilizes limited delay orders, making real-time industrial implementation feasible.
This section presented a comprehensive evaluation of the proposed intelligent fault diagnosis framework. Experimental results confirmed that the NARX neural network effectively models nonlinear dynamic relationships within multi-sensor induction motor data. The high classification accuracy, strong ROC performance, and minimal misclassification demonstrate the reliability and robustness of the methodology. Multi-domain feature fusion and dynamic modeling collectively enhance predictive maintenance capability in three-phase induction motor systems.
CONCLUSION
This study presented a dynamic intelligent monitoring and fault diagnosis framework for three-phase induction motors based on multi-sensor data fusion and a Nonlinear AutoRegressive model with eXogenous inputs (NARX) neural network. The proposed methodology integrates electrical (three-phase currents), mechanical (vibration), and thermal (temperature) measurements into a unified diagnostic architecture capable of modeling nonlinear temporal system behavior. The experimental validation conducted on a laboratory-scale test bench confirmed that combining time-domain and frequency-domain feature extraction with dynamic neural network modeling significantly enhances classification reliability. The obtained diagnostic accuracies for bearing faults, for stator faults, for shaft misalignment, and for general faulty motor detection—demonstrate strong discrimination capability across diverse fault categories. The principal scientific contribution of this work lies in the integration of dynamic temporal modeling with multi-domain sensor fusion for early-stage fault detection. Unlike static classifiers, the NARX architecture incorporates delayed inputs and outputs, enabling effective modeling of progressive degradation patterns. This dynamic capability improves robustness under varying operational conditions and reduces false alarm probability.
From an industrial perspective, the proposed framework supports predictive maintenance strategies by enabling early detection of mechanical and electrical anomalies before catastrophic failure occurs. The relatively low computational complexity of the selected NARX configuration makes real-time implementation feasible in industrial monitoring platforms.
Future research directions include extending the framework to additional fault types such as rotor bar breakage and insulation aging, validating performance under variable load and speed conditions, and integrating the model into cloud-based or IoT-enabled online monitoring systems for large-scale industrial deployment.
In conclusion, the developed multi-sensor NARX-based intelligent diagnostic system provides a reliable, scalable, and practically applicable solution for enhancing operational safety, reducing downtime, and improving energy efficiency in three-phase induction motor applications.
Conflict of Interest
The authors declare no conflict of interest.
Ethical Approval
Not applicable
Data Availability
The datasets used in this study are openly available at [repository link] and the source code is available on GitHub at [GitHub link].
Funding
This work did not receive any external funding.
Cite this article
Related Research



Special Issue
Launch a focused special issue to highlight research, emerging trends, and expert insights in your academic field.
